- Station:
- Location where the points were measured from.
- Different scanners have different processes for handling this.
- Scan:
- Combination of an individual Point Cloud and Station
- A scan produces a point cloud.
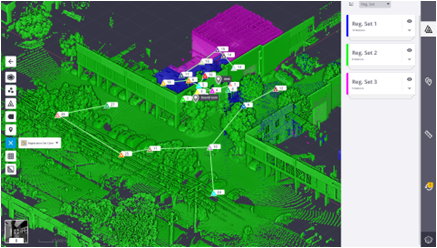
- Registration:
- How a scan joins to another scan and is positioned
- Can be done automatically or manually
- Registration sets:
- When scans are registered together they become a registration set.
- Multiple registration sets can exist in a project
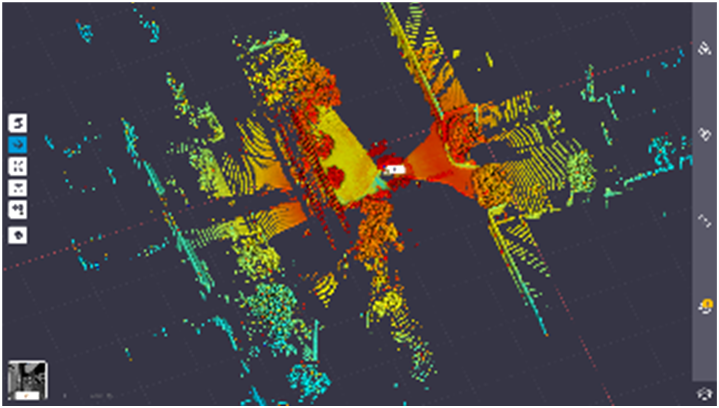
- Point Cloud:
- A point cloud is a set of data points in space.
- The points represent a 3D shape or object.
- Each point has its set of X, Y and Z coordinates.
- Images:
- Photos captured during the scanning process.
- Panoramas are also generated from the images captured.

- Colourising:
- Applying colour to the Point Cloud
- Done as a secondary process by overlaying the point cloud against the images and giving the point the colour it overlays.
- Levelled scans:
- Scans where levelled has been determined while scanning.
- Unlevelled scans:
- Scans that don’t have any level information associated with them.
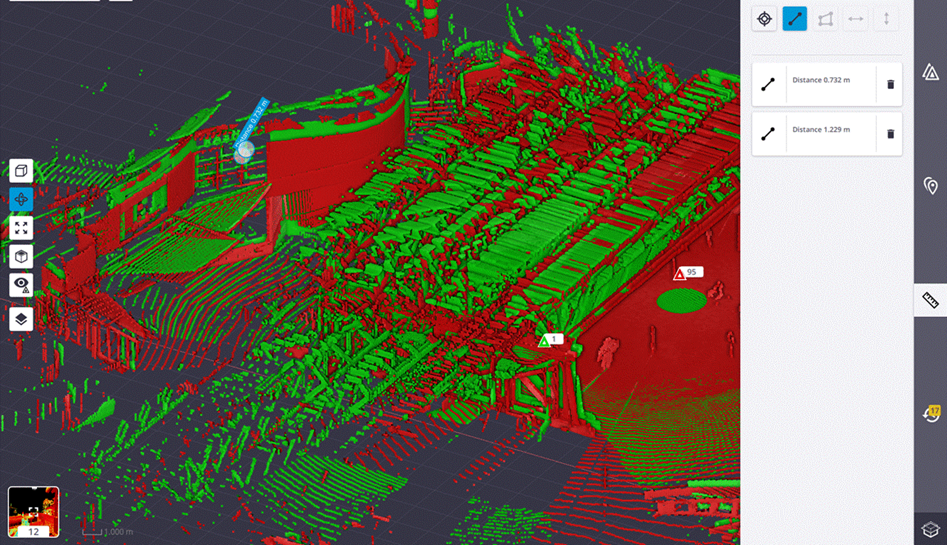
- Refinement:
- Final tightening of the whole point cloud.
- Errors:
- Refers generally to mismatching of scan data.
- Can be small (mm) or large (m)
- Most errors can be minimised through observing best field practices or post processing.
- Understanding the different types of registration is important to understanding errors.
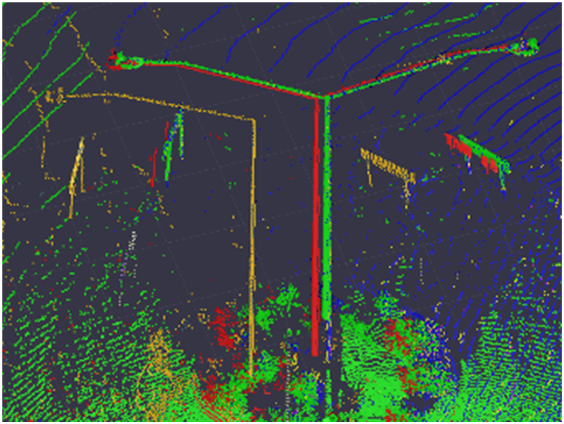
- Shadowing:
- Scanning can’t see around, through or behind objects.
- Shadowing occurs in scans when an object blocks the scanning of data behind it causing a “shadowing” effect in the point cloud
- Ghosting:
- When scans don’t match up properly
- Visually several elements seem to occur in the same location
- Noise:
- Points that are picked up in scanning data that are either low precision results or points that are not desired in the final output.
×
![]()